车牌识别
节点基于 YOLO 检测车牌位置,并使用 HyperLPR3 对裁剪区域进行读牌;在图像上叠加【原始车牌文本 + 置信度】并发布结构化结果。
内置节点 license_plate_recognition 订阅 /camera_raw,识别并可视化后发布图像与消息结果(未安装 hyperlpr3 时仅输出检测框)。

启动命令
shell
ros2 run pycodevision license_plate_recognition
该节点默认绑定可以直接通过平台节点管理菜单启动。
节点参数说明
| 参数名 | 描述 | 类型 | 默认值 | 说明 |
|---|---|---|---|---|
| det_model_path | 车牌检测模型文件路径 | String | best.pt | 支持 .onnx 或 .pt/.pth;相对路径将基于环境变量 PYCODEBOT_HOME 拼接到 src/model/license_plate_recognition,必须是存在的“文件”,否则报错退出。 |
| input_topic | 订阅主题 | String | camera/image_raw | 输入图像主题;可改为压缩图像主题(例如 /camera_jpeg) |
| input_encoding | 输入图像编码 | String | bgr8 | 仅支持 bgr8 或 jpeg;据此自动选择订阅消息类型(sensor_msgs/Image 或 sensor_msgs/CompressedImage) |
| output_fps | 发布帧率 | int | 6 | 定时器发布频率(Hz),影响图像/消息的发送速率 |
| output_quality | JPEG 压缩质量 | int | 60 | 范围 [0~100];仅对发布的压缩图像生效(值越大越清晰但更大) |
| output_image_close | 关闭图像发布 | bool | false | false:发布处理后图像到 /{name}/image_jpeg;true:仅发布文字消息 |
参数使用方法
shell
# 订阅压缩图像输入(来自 camera_jpeg),并指定检测模型与降低输出帧率、画质
ros2 run pycodevision license_plate_recognition --ros-args \
-p det_model_path:=best.onnx \
-p input_topic:=/camera_jpeg \
-p input_encoding:=jpeg \
-p output_fps:=5 \
-p output_quality:=50
# 仅发布文字消息(不发布处理后图像)
ros2 run pycodevision license_plate_recognition --ros-args -p output_image_close:=true
视频查看
点击“车牌识别”节点,进入该节点通信页面。
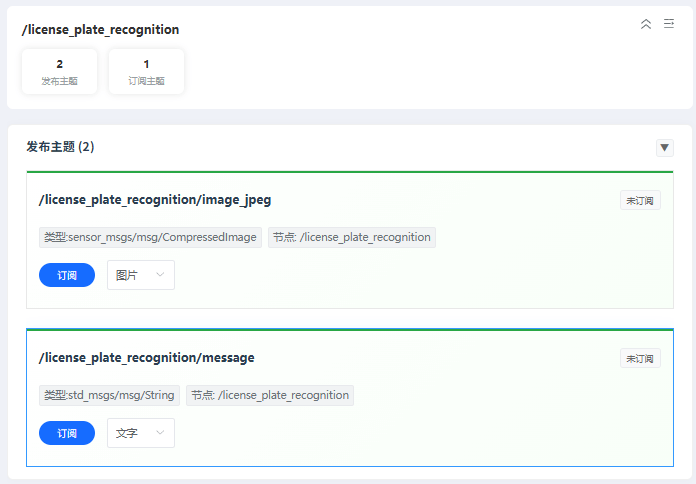
点击发布主题“/license_plate_recognition/image_jpeg”中的“订阅”按钮,类型默认选择“图片”,弹出视频显示窗口;或点击发布主题“/license_plate_recognition/message”选择“文本”,即可查看发布消息。
