手势识别
节点参数说明
| 参数名 | 描述 | 类型 | 默认值 | 说明 |
|---|---|---|---|---|
| input_topic | 订阅主题 | String | camera/image_raw | 输入图像主题;可改为压缩图像主题(例如 /camera_jpeg) |
| input_encoding | 输入图像编码 | String | bgr8 | 仅支持 bgr8 或 jpeg;据此自动选择订阅消息类型(sensor_msgs/Image 或 sensor_msgs/CompressedImage) |
| output_fps | 发布帧率 | int | 6 | 定时器发布频率(Hz),影响图像/消息的发送速率 |
| output_quality | JPEG 压缩质量 | int | 60 | 范围 [0~100];仅对发布的压缩图像生效(值越大越清晰但更大) |
| output_image_close | 关闭图像发布 | bool | false | false:发布处理后图像到 /{name}/image_jpeg;true:仅发布文字消息 |
数字手势识别
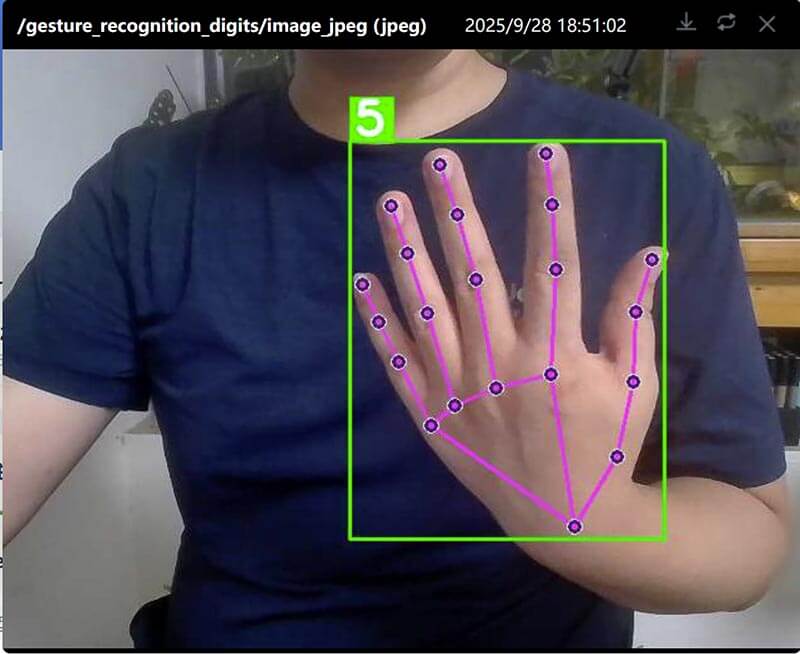
节点基于 MediaPipe Hands 动态检测与识别中文数字手势(1~10),并以“稀疏标注”方式可视化手部关键点与连接线,显示更清爽。
内置节点 gesture_recognition_digits 订阅 /camera_raw,识别并可视化后发布图像与消息结果。特殊手势有优先级:10(拳头,全弯曲)、6(拇指+小指,shaka)、7(拇指与食/中指捏合,环/小指弯曲)、8(仅拇指+食指竖起,手枪)、9(食指钩形,其余弯曲);若不匹配再按伸直手指数计数 1~5。

启动命令
该节点默认绑定可以直接通过平台节点管理菜单启动。
参数使用方法
视频查看
点击“数字手势识别”节点,进入该节点通信页面。
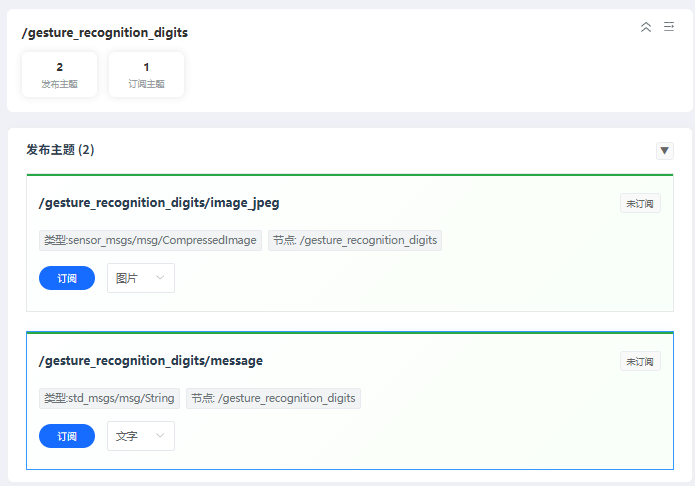
点击发布主题“/gesture_recognition_digits/image_jpeg”中的“订阅”按钮,类型默认选择“图片”,弹出视频显示窗口;
或点击发布主题“/gesture_recognition_digits/message”选择“文本”,即可查看发布消息。
食指方向识别(四方向)
节点基于 MediaPipe Hands 动态检测手部关键点:当食指被判定为“伸直”且方向向量足够稳定时,输出指向方向标签:上 / 下 / 左 / 右。
内置节点 gesture_recognition_index_direction 订阅 /camera_raw(或按参数指定的输入主题),识别并可视化后发布图像与消息结果。

启动命令
该节点默认绑定可以直接通过平台节点管理菜单启动。
参数使用方法
视频查看
点击“食指方向识别(四方向)”节点,进入该节点通信页面。
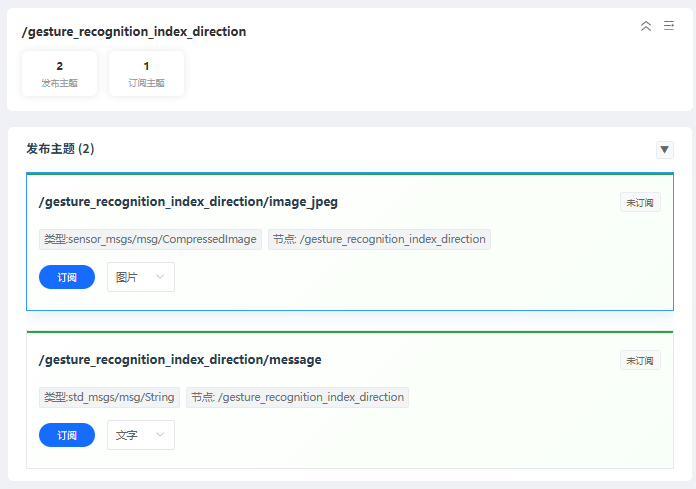
点击发布主题“/gesture_recognition_index_direction/image_jpeg”中的“订阅”按钮,类型默认选择“图片”,弹出视频显示窗口;
或点击发布主题“/gesture_recognition_index_direction/message”选择“文本”,即可查看发布消息(如
RIGHT、UP 等)。

猜拳识别
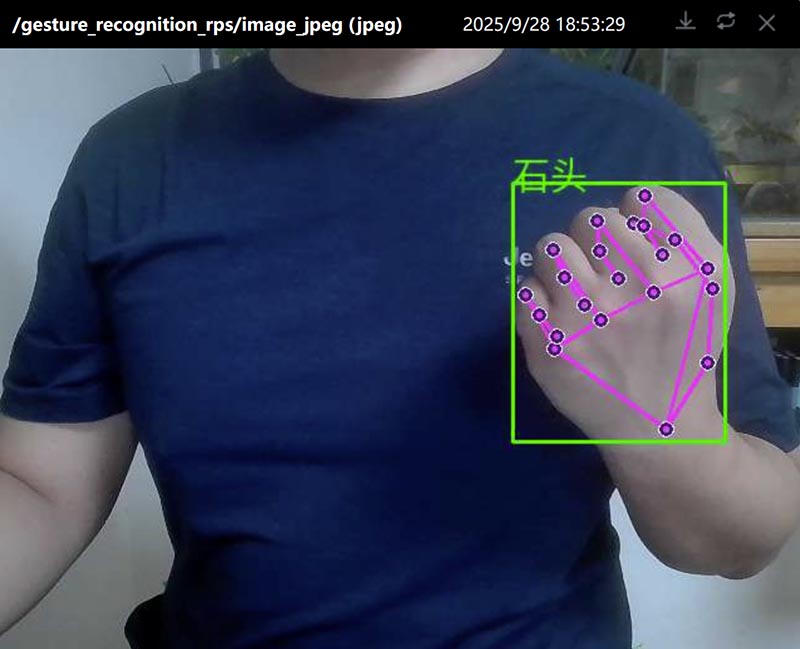
节点基于 MediaPipe Hands 动态检测与识别手势,输出三类:“rock 石头 / scissors 剪刀 / paper 布”,并以关键点与手部骨架的“稀疏标注”方式可视化。
内置节点 gesture_recognition_rps 订阅 /camera_raw,识别并可视化后发布图像与消息结果(消息包含英文 value 与中文 message)。

启动命令
该节点默认绑定可以直接通过平台节点管理菜单启动。
参数使用方法
视频查看
点击“猜拳识别”节点,进入该节点通信页面。
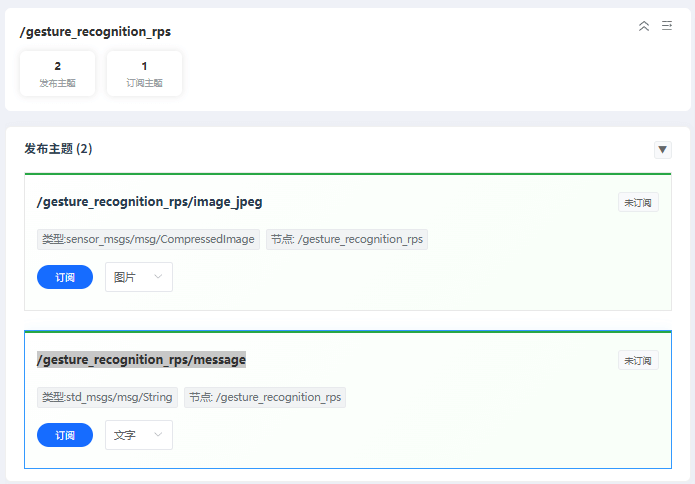
点击发布主题“/gesture_recognition_rps/image_jpeg”中的“订阅”按钮,类型默认选择“图片”,弹出视频显示窗口;
或点击发布主题“/gesture_recognition_rps/message”选择“文本”,即可查看发布消息。