机器视觉
机器视觉使用摄像头拍摄的图像进行分析处理。可识别人脸、姿态、手势、车牌、颜色、物体等。识别后进一步进行逻辑处理或控制机器人的动作等。
可参考平台架构部分介绍
视频采集
摄像头让机器人看得见,识别处理是让机器人看得懂。看得见是机器视觉的基础。
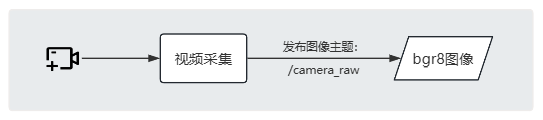
视频采集节点获取图像数据,不同ROS机器人硬件,摄像头读取图像方式不同,图像采集发布摄像头图片数据,屏蔽不同硬件差异。识别功能节点负责处理图像,无需关心图像采集方法。
USB摄像头
内置节点 camera_raw 支持USB摄像头启动。
启动命令
shell
ros2 run pycodebot node_camera_raw
该节点默认绑定可以直接通过平台节点管理菜单启动。
节点参数说明
| 参数名 | 描述 | 类型 | 默认值 | 说明 |
|---|---|---|---|---|
| device | 设备ID | String | "0" | "0"表示自动查找可用的USB设备 |
| width | 图像宽 | int | 640 | 输出图像的宽度,单位像素,最大值由具体摄像头硬件决定 |
| height | 图像高 | int | 480 | 输出图像的高度,单位像素,最大值由具体摄像头硬件决定 |
| fps | 帧率 | int | 30 | 每秒采集多少张图片,最大值由具体摄像头硬件决定 |
参数使用方法
shell
#降低图像采集帧率
ros2 run pycodebot node_camera_raw --ros-args -p fps:=6
MIPI摄像头
与硬件平台相关, TogetheROS平台参考 MIPI图像采集。