日志管理
日志管理是ROS开发的重要组成部分,用于记录功能执行过程中的各种信息,包括请求、响应、错误等。通过日志管理,可以方便地查看执行过程和排查问题,以及进行性能分析。
最大显示1000条日志,超过限制最早的日志会被删除。
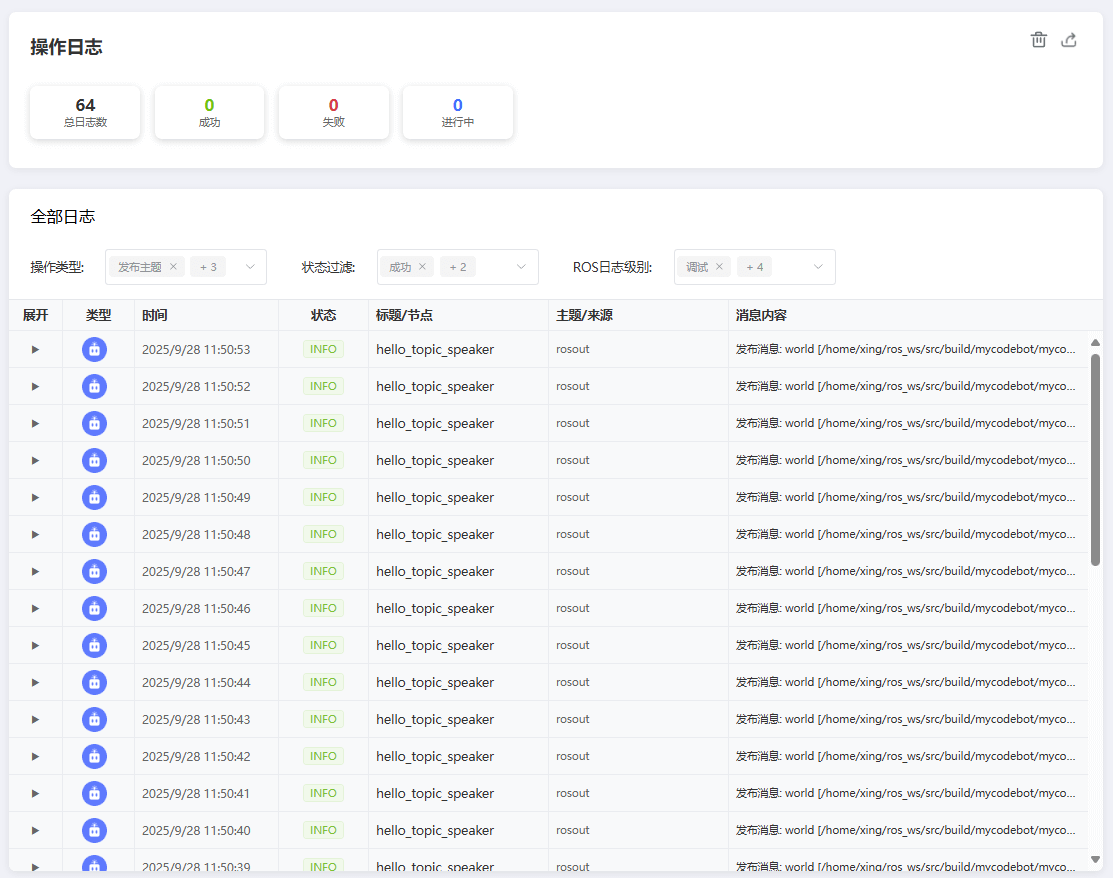
操作类型
操作类型用于标识产生日志信息的操作,操作类型包括:
- 发布主题:记录前端对ROS发布主题发生的订阅动作,及收到的订阅数据。
- 订阅主题:记录前端对ROS订阅主题发送的数据。
- 服务:记录前端对ROS服务发送数据及收到的返回数据。
操作状态
上述操作的执行状态,分为:成功、失败、进行中。
日志级别
通过ROS logger记录的日志:
- 调试信息(DEBUG):用于开发过程中排查问题。
- 一般信息(INFO):用于记录功能执行过程中的重要事件。
- 警告信息(WARNING):表示潜在的问题或不建议的操作。
- 错误信息(ERROR):但节点可能还能继续运行。
- 致命错误(FATAL):通常会导致节点崩溃或无法继续运行。