机器人管理
可添加任意类型的 ROS 设备,进行管理、开发和调试,比如机器狗、机器人、无人机、机器车和机械臂等。
添加设备
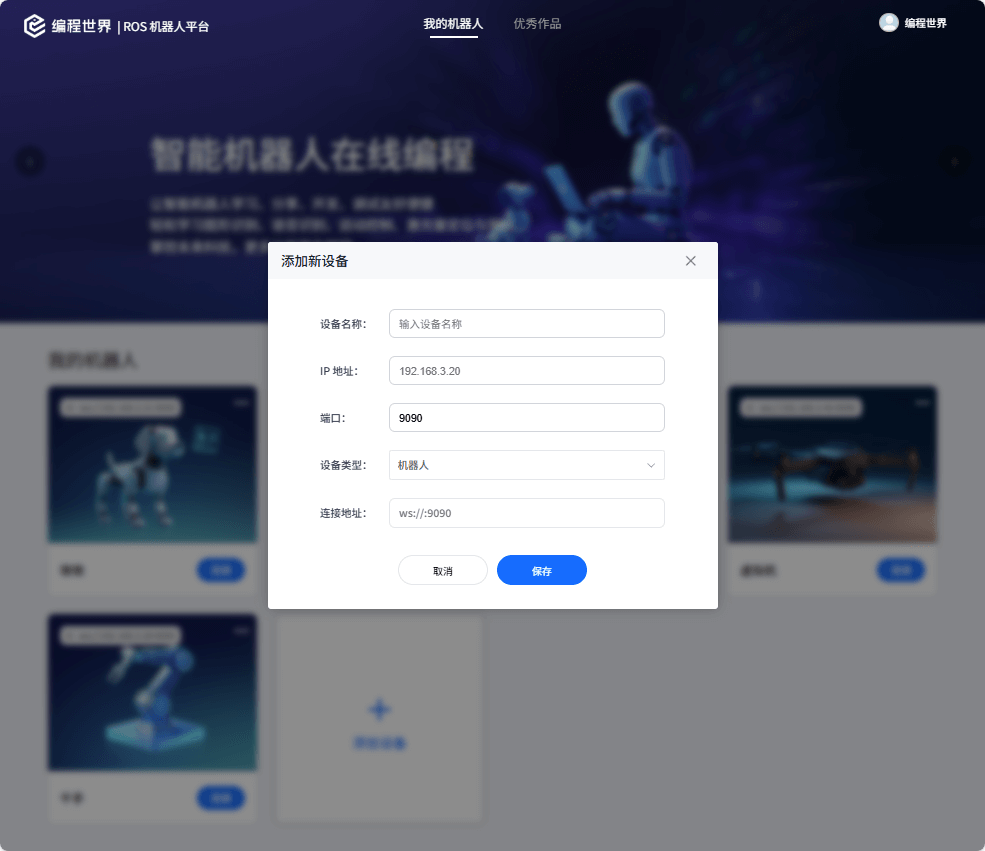
进入机器人首页,点击“添加设备”:
设备名称 :为您的机器人起个名字。
IP地址:设备在网络中的IP地址。
端口:默认9090,无需更改。
设备类型:可选内置常见的机器人类型:机器狗、机器人、无人机、机器车和机械臂。
连接地址:自动生成的websocket通信地址,无需更改。
填写完成后,点击“保存”按钮,在首页可以看到该设备。
连接设备
点击设备卡片“连接”按钮,连接成功,进入设备操作页面。
连接失败可能原因:
1. pycodebot 服务未正常启动。
2. rosbridge-server 未正确安装和启动。
编辑设备

点击已添加设备卡片右上角菜单按钮,弹出菜单项选择“编辑设备” 。
可修改内容与添加设备时相同,点击“保存”按钮完成编辑操作。
删除设备
点击已添加设备卡片右上角菜单按钮,弹出菜单项选择“删除设备” 。
弹出对话框中选择“确定”删除设备。