代码管理
内置代码
内置常见视觉、语音、应用示例代码:
|----mycodebot # 用户代码,建议自己开发代码放到此包中 |----pycodeapp # 综合应用代码 |----pycodeaudio # 语音识别代码 |----pycodevision # 图像识别代码 |----pycodebot # 管理代码:隐藏,不可修改否则影响使用 |----pycodemsg # 消息代码:隐藏,不可修改否则影响使用 |----model # 模型文件夹,建议根据节点名称创建子文件夹,放置模型文件,一个节点可以放置多个模型文件 |----data # 数据文件夹,建议根据节点名称创建子文件夹,放置节点数据文件
包代码结构
Python开发ROS包的代码结构如下:
my_package/ # ROS 包根目录
|---- my_package/ # 必须:一般与包名相同,功能的实现代码
| |---- __init__.py # 必须:将此目录标记为 Python 包(可以为空文件)
| |---- module1.py # 可选:功能模块代码文件,可以包含多个
|---- launch/ # 可选:包启动配置,launch启动方式时使用
| |---- my_package.launch.py # 文件命名方式:包名.launch.py
|---- resource/ # 可选:存放节点资源文件目录
|---- my_package.py # 包使用的配置数据
|---- package.xml # 必须:定义包元信息和依赖(如 rospy, std_msgs)
|---- setup.py # 必须:启动脚本
|---- setup.cfg # 必须:启动配置文件
文件操作
包文件夹支持的操作:新建文件、新建文件及、编译包、运行包、重命令、复制、删除、上传文件、上传文件夹
节点文件支持的操作:运行节点、重命令、复制、删除
一般文件夹支持的操作:新建文件、新建文件及、重命令、复制、删除、上传文件、上传文件夹
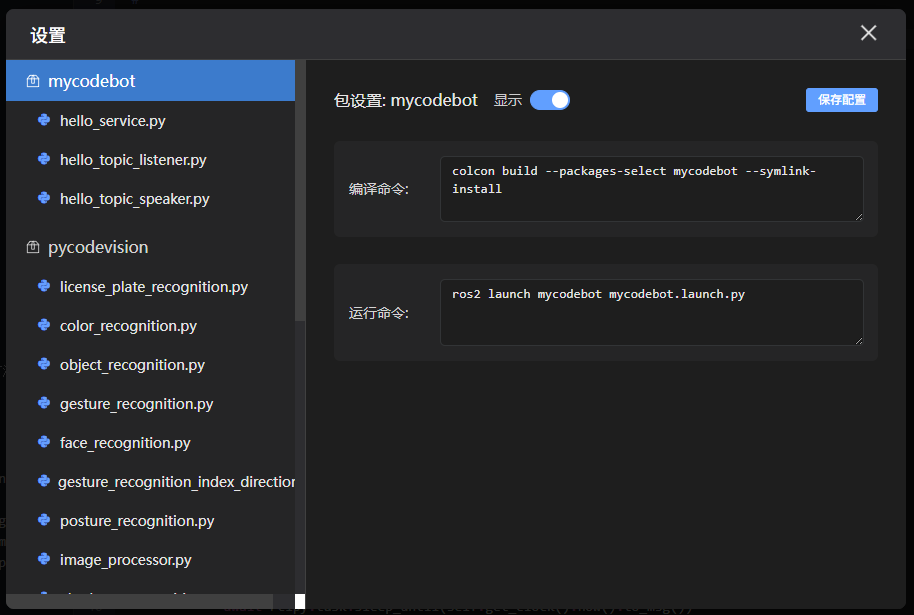
包配置
点击文件结构右侧"设置"按钮,包编译和运行需要设置,根据包名自动填充命令,请根据实际情况修改。
点击对话框中的"显示"按钮,取消显示文件树中不再显示该包内容。
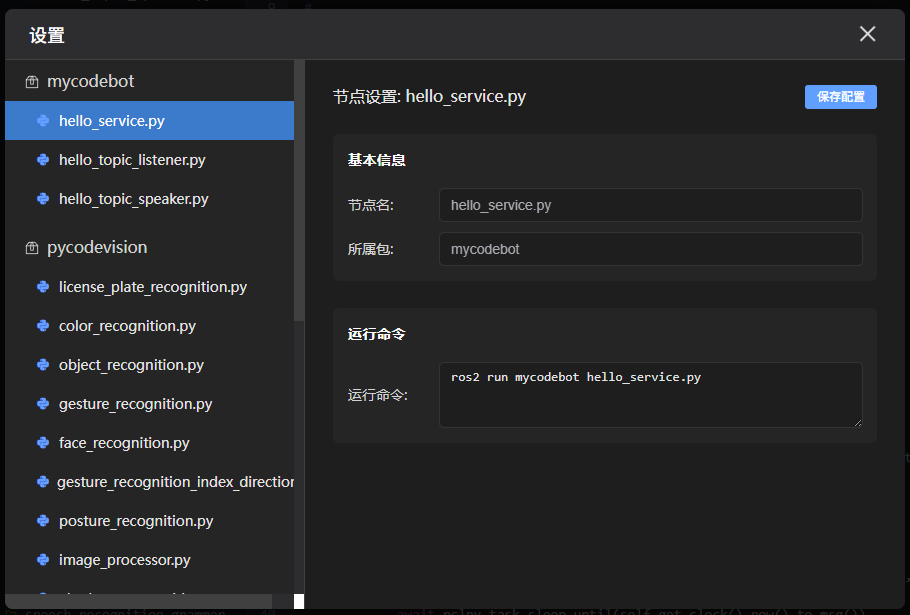
节点配置
运行节点需要配置,根据包名和节点文件名自动生成运行命令,请根据实际情况修改。