相对位姿
基于IMU里程计数据(nav_msgs/msg/Odometry)实现“相对位姿”计算。以第一帧有效姿态为起点,持续计算并输出:位移分量 dx、dy,位移模长 distance,以及相对偏转角 d_yaw(弧度/角度)。
相对位姿节点(odom_rel_pose) 订阅 odom(里程计),并通过主题 rel_pose_json 发布相对位置和偏移角度。

启动运动底盘
以OriginBot智能小车为例,先启动小车底盘运动控制
shell
ros2 launch originbot_bringup originbot.launch.py
启动节点命令
shell
ros2 run pycodeapp odom_rel_pose
该节点默认绑定可以直接通过平台节点管理菜单启动。
节点参数说明
| 参数名 | 描述 | 类型 | 默认值 | 说明 |
|---|---|---|---|---|
| odom_topic | 里程计主题 | String | odom | 订阅的 nav_msgs/Odometry 话题名。 |
| log_rate_hz | 日志/发布频率 | double | 5.0 | 定时输出日志并发布 JSON 的频率(Hz)。 |
| odom_timeout_sec | 里程计超时阈值 | double | 0.6 | 超过该秒数未更新里程计则暂停输出与发布。 |
| use_header_time | 使用消息时间 | bool | true | 优先用消息头时间戳判断超时;否则使用本地时间。 |
| precision | 小数位精度 | integer | 3 | 日志与 JSON 中数值的保留小数位。 |
| rel_pose_topic | 合并 JSON 主题 | String | rel_pose_json | 相对位姿JSON数据 std_msgs/String 话题名。 |
参数使用方法
shell
# 自定义里程计话题与发布频率、显示精度与日志内容
ros2 run pycodeapp odom_rel_pose --ros-args \
-p odom_topic:=odom \
-p rel_pose_topic:=rel_pose_json \
-p log_rate_hz:=10.0 \
-p precision:=4
# 调整超时阈值与时间戳来源
ros2 run pycodeapp odom_rel_pose --ros-args \
-p odom_timeout_sec:=0.3 \
-p use_header_time:=false
日志查看
点击“相对位姿记录”节点,进入该节点通信页面。
点击发布主题“/rel_pose_json”中的“订阅”按钮,类型选择“文字”,可查看 JSON(含 displacement、yaw、stamp)。
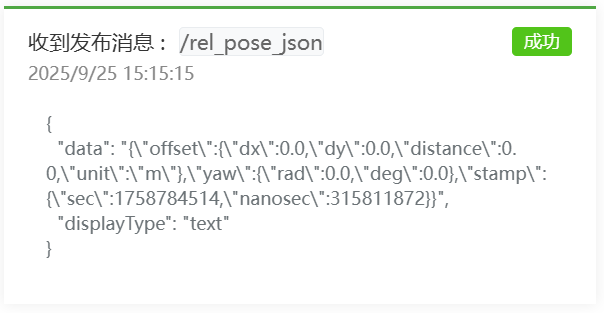
格式说明
json
{
"offset":
{
"dx": 0.0, //x方向偏移,向前为正,向后为负
"dy": 0.0, //y方向偏移,向左为正,向右为负
"distance": 0.0, //总偏移距离
"unit": "m" //单位(米)
},
"yaw":
{
"deg": 0.0 // 朝向偏移角度,逆时针为正,大于180编为负值表示;顺时针为负,小于-180变为正值表示
"rad": 0.0, // 朝向偏移弧度,
},
"stamp":
{
"sec": 0, // 时间戳秒
"nanosec": 0 // 时间戳纳秒
}
}